Class for transforming a model1 to the space of model0. More...
#include <gim_box_collision.h>
Public Member Functions | |
| void | calc_absolute_matrix () |
| GIM_BOX_BOX_TRANSFORM_CACHE () | |
| GIM_BOX_BOX_TRANSFORM_CACHE (mat4f trans1_to_0) | |
| void | calc_from_homogenic (const btTransform &trans0, const btTransform &trans1) |
| Calc the transformation relative 1 to 0. Inverts matrics by transposing. More... | |
| void | calc_from_full_invert (const btTransform &trans0, const btTransform &trans1) |
| Calcs the full invertion of the matrices. Useful for scaling matrices. More... | |
| btVector3 | transform (const btVector3 &point) |
Public Attributes | |
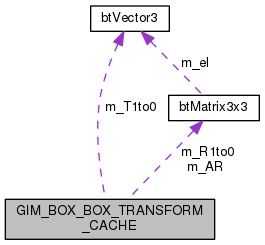
| btVector3 | m_T1to0 |
| Transforms translation of model1 to model 0. More... | |
| btMatrix3x3 | m_R1to0 |
| Transforms Rotation of model1 to model 0, equal to R0' * R1. More... | |
| btMatrix3x3 | m_AR |
| Absolute value of m_R1to0. More... | |
Detailed Description
Class for transforming a model1 to the space of model0.
Definition at line 138 of file gim_box_collision.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 153 of file gim_box_collision.h.
|
inline |
Definition at line 158 of file gim_box_collision.h.
Member Function Documentation
|
inline |
Definition at line 145 of file gim_box_collision.h.
|
inline |
Calcs the full invertion of the matrices. Useful for scaling matrices.
Definition at line 179 of file gim_box_collision.h.
|
inline |
Calc the transformation relative 1 to 0. Inverts matrics by transposing.
Definition at line 166 of file gim_box_collision.h.
Definition at line 190 of file gim_box_collision.h.
Member Data Documentation
| btMatrix3x3 GIM_BOX_BOX_TRANSFORM_CACHE::m_AR |
Absolute value of m_R1to0.
Definition at line 143 of file gim_box_collision.h.
| btMatrix3x3 GIM_BOX_BOX_TRANSFORM_CACHE::m_R1to0 |
Transforms Rotation of model1 to model 0, equal to R0' * R1.
Definition at line 142 of file gim_box_collision.h.
| btVector3 GIM_BOX_BOX_TRANSFORM_CACHE::m_T1to0 |
Transforms translation of model1 to model 0.
Definition at line 141 of file gim_box_collision.h.
The documentation for this class was generated from the following file:
