I'm evaluating different options for simulating tracked vehicles. I don't care much about sophisticated suspension, the movement just should look somewhat plausible.
Having a plain old wheeled vehicle for physics (and adding the tracks in the visualization only) breaks quite soon:
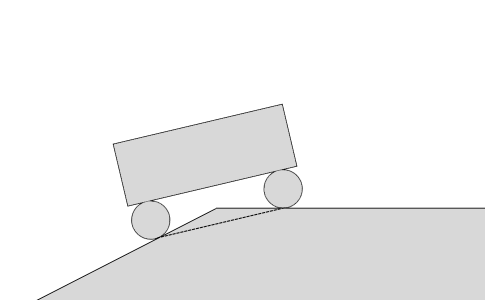
In this situation, the tracks would go right through the ground. This could be avoided by adding some (low-friction) shape in-between the wheels:
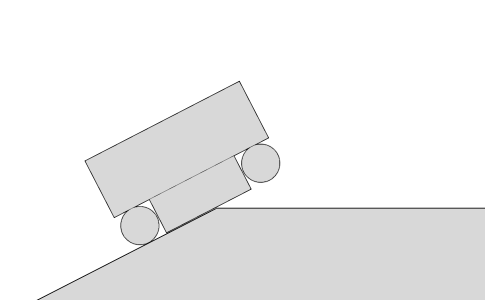
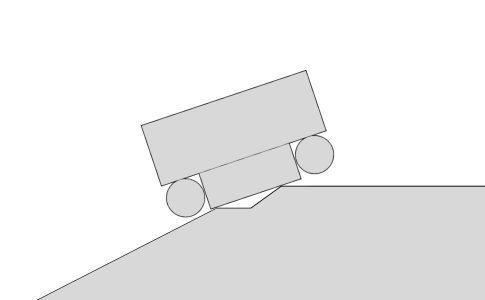
But then again, this construct could easily get in a situation where the wheels lose ground contact:
I could add more wheels to get a better simulation, but I think what I really want is some tangential force coming out of a planar shape (and having no wheels at all):
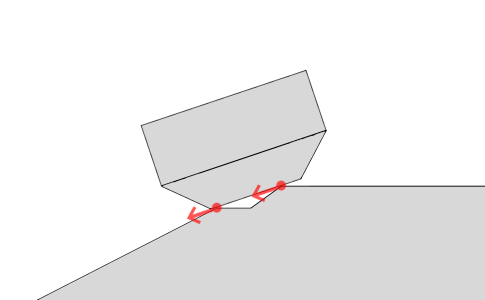
I have read about simulating conveyor belts with bullet, which goes in the right direction. But as far as I understand, they always go to a target tangential speed. In my scenario, the speed should be limited by the maximum torque that can be supplied by the vehicle's engine, so the available torque would have to be divided amongst all contact points somehow.
Is there a way to accomplish this with bullet?