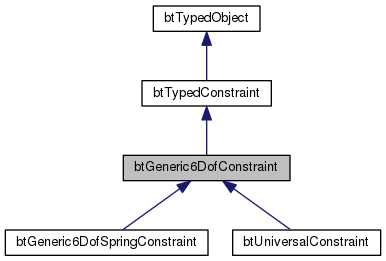
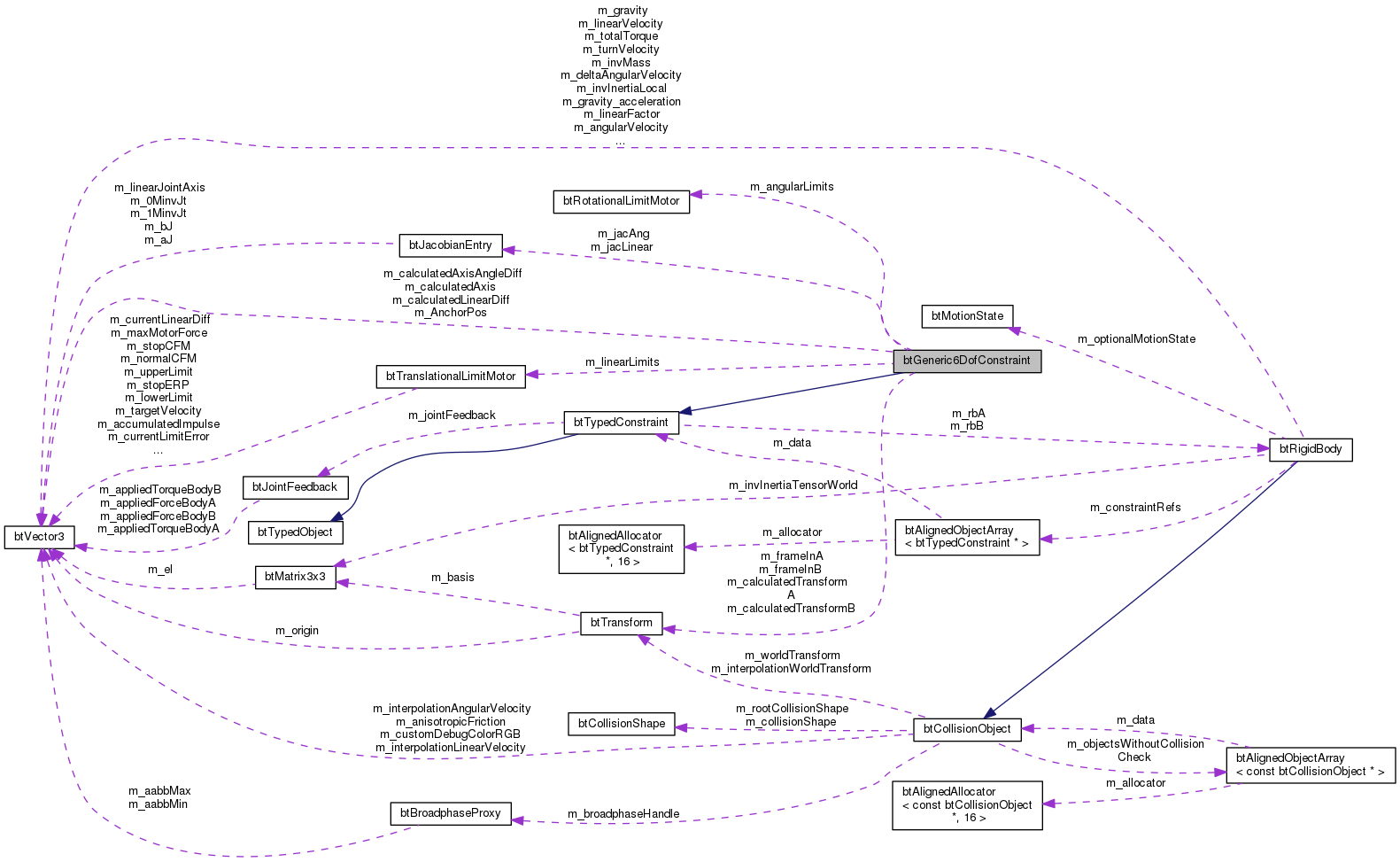
btGeneric6DofConstraint between two rigidbodies each with a pivotpoint that descibes the axis location in local space More...
#include <btGeneric6DofConstraint.h>
Public Member Functions | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btGeneric6DofConstraint (btRigidBody &rbA, btRigidBody &rbB, const btTransform &frameInA, const btTransform &frameInB, bool useLinearReferenceFrameA) | |
| btGeneric6DofConstraint (btRigidBody &rbB, const btTransform &frameInB, bool useLinearReferenceFrameB) | |
| void | calculateTransforms (const btTransform &transA, const btTransform &transB) |
| Calcs global transform of the offsets. More... | |
| void | calculateTransforms () |
| const btTransform & | getCalculatedTransformA () const |
| Gets the global transform of the offset for body A. More... | |
| const btTransform & | getCalculatedTransformB () const |
| Gets the global transform of the offset for body B. More... | |
| const btTransform & | getFrameOffsetA () const |
| const btTransform & | getFrameOffsetB () const |
| btTransform & | getFrameOffsetA () |
| btTransform & | getFrameOffsetB () |
| virtual void | buildJacobian () |
| performs Jacobian calculation, and also calculates angle differences and axis More... | |
| virtual void | getInfo1 (btConstraintInfo1 *info) |
| internal method used by the constraint solver, don't use them directly More... | |
| void | getInfo1NonVirtual (btConstraintInfo1 *info) |
| virtual void | getInfo2 (btConstraintInfo2 *info) |
| internal method used by the constraint solver, don't use them directly More... | |
| void | getInfo2NonVirtual (btConstraintInfo2 *info, const btTransform &transA, const btTransform &transB, const btVector3 &linVelA, const btVector3 &linVelB, const btVector3 &angVelA, const btVector3 &angVelB) |
| void | updateRHS (btScalar timeStep) |
| btVector3 | getAxis (int axis_index) const |
| Get the rotation axis in global coordinates. More... | |
| btScalar | getAngle (int axis_index) const |
| Get the relative Euler angle. More... | |
| btScalar | getRelativePivotPosition (int axis_index) const |
| Get the relative position of the constraint pivot. More... | |
| void | setFrames (const btTransform &frameA, const btTransform &frameB) |
| bool | testAngularLimitMotor (int axis_index) |
| Test angular limit. More... | |
| void | setLinearLowerLimit (const btVector3 &linearLower) |
| void | getLinearLowerLimit (btVector3 &linearLower) const |
| void | setLinearUpperLimit (const btVector3 &linearUpper) |
| void | getLinearUpperLimit (btVector3 &linearUpper) const |
| void | setAngularLowerLimit (const btVector3 &angularLower) |
| void | getAngularLowerLimit (btVector3 &angularLower) const |
| void | setAngularUpperLimit (const btVector3 &angularUpper) |
| void | getAngularUpperLimit (btVector3 &angularUpper) const |
| btRotationalLimitMotor * | getRotationalLimitMotor (int index) |
| Retrieves the angular limit informacion. More... | |
| btTranslationalLimitMotor * | getTranslationalLimitMotor () |
| Retrieves the limit informacion. More... | |
| void | setLimit (int axis, btScalar lo, btScalar hi) |
| bool | isLimited (int limitIndex) const |
| Test limit. More... | |
| virtual void | calcAnchorPos (void) |
| int | get_limit_motor_info2 (btRotationalLimitMotor *limot, const btTransform &transA, const btTransform &transB, const btVector3 &linVelA, const btVector3 &linVelB, const btVector3 &angVelA, const btVector3 &angVelB, btConstraintInfo2 *info, int row, btVector3 &ax1, int rotational, int rotAllowed=false) |
| bool | getUseFrameOffset () const |
| void | setUseFrameOffset (bool frameOffsetOnOff) |
| bool | getUseLinearReferenceFrameA () const |
| void | setUseLinearReferenceFrameA (bool linearReferenceFrameA) |
| virtual void | setParam (int num, btScalar value, int axis=-1) |
| override the default global value of a parameter (such as ERP or CFM), optionally provide the axis (0..5). More... | |
| virtual btScalar | getParam (int num, int axis=-1) const |
| return the local value of parameter More... | |
| void | setAxis (const btVector3 &axis1, const btVector3 &axis2) |
| virtual int | getFlags () const |
| virtual int | calculateSerializeBufferSize () const |
| virtual const char * | serialize (void *dataBuffer, btSerializer *serializer) const |
| fills the dataBuffer and returns the struct name (and 0 on failure) More... | |
 Public Member Functions inherited from btTypedConstraint Public Member Functions inherited from btTypedConstraint | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| virtual | ~btTypedConstraint () |
| btTypedConstraint (btTypedConstraintType type, btRigidBody &rbA) | |
| btTypedConstraint (btTypedConstraintType type, btRigidBody &rbA, btRigidBody &rbB) | |
| int | getOverrideNumSolverIterations () const |
| void | setOverrideNumSolverIterations (int overideNumIterations) |
| override the number of constraint solver iterations used to solve this constraint -1 will use the default number of iterations, as specified in SolverInfo.m_numIterations More... | |
| virtual void | setupSolverConstraint (btConstraintArray &ca, int solverBodyA, int solverBodyB, btScalar timeStep) |
| internal method used by the constraint solver, don't use them directly More... | |
| void | internalSetAppliedImpulse (btScalar appliedImpulse) |
| internal method used by the constraint solver, don't use them directly More... | |
| btScalar | internalGetAppliedImpulse () |
| internal method used by the constraint solver, don't use them directly More... | |
| btScalar | getBreakingImpulseThreshold () const |
| void | setBreakingImpulseThreshold (btScalar threshold) |
| bool | isEnabled () const |
| void | setEnabled (bool enabled) |
| virtual void | solveConstraintObsolete (btSolverBody &, btSolverBody &, btScalar) |
| internal method used by the constraint solver, don't use them directly More... | |
| const btRigidBody & | getRigidBodyA () const |
| const btRigidBody & | getRigidBodyB () const |
| btRigidBody & | getRigidBodyA () |
| btRigidBody & | getRigidBodyB () |
| int | getUserConstraintType () const |
| void | setUserConstraintType (int userConstraintType) |
| void | setUserConstraintId (int uid) |
| int | getUserConstraintId () const |
| void | setUserConstraintPtr (void *ptr) |
| void * | getUserConstraintPtr () |
| void | setJointFeedback (btJointFeedback *jointFeedback) |
| const btJointFeedback * | getJointFeedback () const |
| btJointFeedback * | getJointFeedback () |
| int | getUid () const |
| bool | needsFeedback () const |
| void | enableFeedback (bool needsFeedback) |
| enableFeedback will allow to read the applied linear and angular impulse use getAppliedImpulse, getAppliedLinearImpulse and getAppliedAngularImpulse to read feedback information More... | |
| btScalar | getAppliedImpulse () const |
| getAppliedImpulse is an estimated total applied impulse. More... | |
| btTypedConstraintType | getConstraintType () const |
| void | setDbgDrawSize (btScalar dbgDrawSize) |
| btScalar | getDbgDrawSize () |
| Public Member Functions inherited from btTypedObject | |
| btTypedObject (int objectType) | |
| int | getObjectType () const |
Public Attributes | |
| bool | m_useSolveConstraintObsolete |
| for backwards compatibility during the transition to 'getInfo/getInfo2' More... | |
| Public Attributes inherited from btTypedObject | |
| int | m_objectType |
Protected Member Functions | |
| btGeneric6DofConstraint & | operator= (btGeneric6DofConstraint &other) |
| int | setAngularLimits (btConstraintInfo2 *info, int row_offset, const btTransform &transA, const btTransform &transB, const btVector3 &linVelA, const btVector3 &linVelB, const btVector3 &angVelA, const btVector3 &angVelB) |
| int | setLinearLimits (btConstraintInfo2 *info, int row, const btTransform &transA, const btTransform &transB, const btVector3 &linVelA, const btVector3 &linVelB, const btVector3 &angVelA, const btVector3 &angVelB) |
| void | buildLinearJacobian (btJacobianEntry &jacLinear, const btVector3 &normalWorld, const btVector3 &pivotAInW, const btVector3 &pivotBInW) |
| void | buildAngularJacobian (btJacobianEntry &jacAngular, const btVector3 &jointAxisW) |
| void | calculateLinearInfo () |
| void | calculateAngleInfo () |
| calcs the euler angles between the two bodies. More... | |
| Protected Member Functions inherited from btTypedConstraint | |
| btScalar | getMotorFactor (btScalar pos, btScalar lowLim, btScalar uppLim, btScalar vel, btScalar timeFact) |
| internal method used by the constraint solver, don't use them directly More... | |
Protected Attributes | |
| btTransform | m_frameInA |
| relative_frames More... | |
| btTransform | m_frameInB |
| the constraint space w.r.t body B More... | |
| btJacobianEntry | m_jacLinear [3] |
| Jacobians. More... | |
| btJacobianEntry | m_jacAng [3] |
| 3 orthogonal angular constraints More... | |
| btTranslationalLimitMotor | m_linearLimits |
| Linear_Limit_parameters. More... | |
| btRotationalLimitMotor | m_angularLimits [3] |
| hinge_parameters More... | |
| btScalar | m_timeStep |
| temporal variables More... | |
| btTransform | m_calculatedTransformA |
| btTransform | m_calculatedTransformB |
| btVector3 | m_calculatedAxisAngleDiff |
| btVector3 | m_calculatedAxis [3] |
| btVector3 | m_calculatedLinearDiff |
| btScalar | m_factA |
| btScalar | m_factB |
| bool | m_hasStaticBody |
| btVector3 | m_AnchorPos |
| bool | m_useLinearReferenceFrameA |
| bool | m_useOffsetForConstraintFrame |
| int | m_flags |
| Protected Attributes inherited from btTypedConstraint | |
| btRigidBody & | m_rbA |
| btRigidBody & | m_rbB |
| btScalar | m_appliedImpulse |
| btScalar | m_dbgDrawSize |
| btJointFeedback * | m_jointFeedback |
Additional Inherited Members | |
| Static Public Member Functions inherited from btTypedConstraint | |
| static btRigidBody & | getFixedBody () |
Detailed Description
btGeneric6DofConstraint between two rigidbodies each with a pivotpoint that descibes the axis location in local space
btGeneric6DofConstraint can leave any of the 6 degree of freedom 'free' or 'locked'. currently this limit supports rotational motors
-
For Linear limits, use btGeneric6DofConstraint.setLinearUpperLimit, btGeneric6DofConstraint.setLinearLowerLimit. You can set the parameters with the btTranslationalLimitMotor structure accsesible through the btGeneric6DofConstraint.getTranslationalLimitMotor method. At this moment translational motors are not supported. May be in the future.
-
For Angular limits, use the btRotationalLimitMotor structure for configuring the limit. This is accessible through btGeneric6DofConstraint.getLimitMotor method, This brings support for limit parameters and motors.
-
Angulars limits have these possible ranges:
AXIS MIN ANGLE MAX ANGLE X -PI PI Y -PI/2 PI/2 Z -PI PI
Definition at line 279 of file btGeneric6DofConstraint.h.
Constructor & Destructor Documentation
| btGeneric6DofConstraint::btGeneric6DofConstraint | ( | btRigidBody & | rbA, |
| btRigidBody & | rbB, | ||
| const btTransform & | frameInA, | ||
| const btTransform & | frameInB, | ||
| bool | useLinearReferenceFrameA | ||
| ) |
Definition at line 38 of file btGeneric6DofConstraint.cpp.
| btGeneric6DofConstraint::btGeneric6DofConstraint | ( | btRigidBody & | rbB, |
| const btTransform & | frameInB, | ||
| bool | useLinearReferenceFrameB | ||
| ) |
not providing rigidbody A means implicitly using worldspace for body A
Definition at line 52 of file btGeneric6DofConstraint.cpp.
Member Function Documentation
| btGeneric6DofConstraint::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
|
protected |
Definition at line 433 of file btGeneric6DofConstraint.cpp.
|
virtual |
performs Jacobian calculation, and also calculates angle differences and axis
Reimplemented from btTypedConstraint.
Definition at line 458 of file btGeneric6DofConstraint.cpp.
|
protected |
Definition at line 415 of file btGeneric6DofConstraint.cpp.
|
virtual |
Definition at line 739 of file btGeneric6DofConstraint.cpp.
|
protected |
calcs the euler angles between the two bodies.
Definition at line 353 of file btGeneric6DofConstraint.cpp.
|
protected |
Definition at line 760 of file btGeneric6DofConstraint.cpp.
|
inlinevirtual |
Reimplemented from btTypedConstraint.
Reimplemented in btGeneric6DofSpringConstraint.
Definition at line 612 of file btGeneric6DofConstraint.h.
| void btGeneric6DofConstraint::calculateTransforms | ( | const btTransform & | transA, |
| const btTransform & | transB | ||
| ) |
Calcs global transform of the offsets.
Calcs the global transform for the joint offset for body A an B, and also calcs the agle differences between the bodies.
- See also
- btGeneric6DofConstraint.getCalculatedTransformA , btGeneric6DofConstraint.getCalculatedTransformB, btGeneric6DofConstraint.calculateAngleInfo
Definition at line 389 of file btGeneric6DofConstraint.cpp.
| void btGeneric6DofConstraint::calculateTransforms | ( | ) |
Definition at line 384 of file btGeneric6DofConstraint.cpp.
| int btGeneric6DofConstraint::get_limit_motor_info2 | ( | btRotationalLimitMotor * | limot, |
| const btTransform & | transA, | ||
| const btTransform & | transB, | ||
| const btVector3 & | linVelA, | ||
| const btVector3 & | linVelB, | ||
| const btVector3 & | angVelA, | ||
| const btVector3 & | angVelB, | ||
| btConstraintInfo2 * | info, | ||
| int | row, | ||
| btVector3 & | ax1, | ||
| int | rotational, | ||
| int | rotAllowed = false |
||
| ) |
Definition at line 773 of file btGeneric6DofConstraint.cpp.
| btScalar btGeneric6DofConstraint::getAngle | ( | int | axis_index | ) | const |
Get the relative Euler angle.
- Precondition
- btGeneric6DofConstraint::calculateTransforms() must be called previously.
Definition at line 732 of file btGeneric6DofConstraint.cpp.
|
inline |
Definition at line 481 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 493 of file btGeneric6DofConstraint.h.
| btVector3 btGeneric6DofConstraint::getAxis | ( | int | axis_index | ) | const |
Get the rotation axis in global coordinates.
- Precondition
- btGeneric6DofConstraint.buildJacobian must be called previously.
Definition at line 720 of file btGeneric6DofConstraint.cpp.
|
inline |
Gets the global transform of the offset for body A.
- See also
- btGeneric6DofConstraint.getFrameOffsetA, btGeneric6DofConstraint.getFrameOffsetB, btGeneric6DofConstraint.calculateAngleInfo.
Definition at line 378 of file btGeneric6DofConstraint.h.
|
inline |
Gets the global transform of the offset for body B.
- See also
- btGeneric6DofConstraint.getFrameOffsetA, btGeneric6DofConstraint.getFrameOffsetB, btGeneric6DofConstraint.calculateAngleInfo.
Definition at line 387 of file btGeneric6DofConstraint.h.
|
inlinevirtual |
Definition at line 566 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 392 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 403 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 397 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 408 of file btGeneric6DofConstraint.h.
|
virtual |
internal method used by the constraint solver, don't use them directly
Implements btTypedConstraint.
Definition at line 520 of file btGeneric6DofConstraint.cpp.
| void btGeneric6DofConstraint::getInfo1NonVirtual | ( | btConstraintInfo1 * | info | ) |
Definition at line 554 of file btGeneric6DofConstraint.cpp.
|
virtual |
internal method used by the constraint solver, don't use them directly
Implements btTypedConstraint.
Reimplemented in btGeneric6DofSpringConstraint.
Definition at line 569 of file btGeneric6DofConstraint.cpp.
| void btGeneric6DofConstraint::getInfo2NonVirtual | ( | btConstraintInfo2 * | info, |
| const btTransform & | transA, | ||
| const btTransform & | transB, | ||
| const btVector3 & | linVelA, | ||
| const btVector3 & | linVelB, | ||
| const btVector3 & | angVelA, | ||
| const btVector3 & | angVelB | ||
| ) |
Definition at line 594 of file btGeneric6DofConstraint.cpp.
|
inline |
Definition at line 460 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 470 of file btGeneric6DofConstraint.h.
|
virtual |
return the local value of parameter
Implements btTypedConstraint.
Definition at line 994 of file btGeneric6DofConstraint.cpp.
| btScalar btGeneric6DofConstraint::getRelativePivotPosition | ( | int | axis_index | ) | const |
Get the relative position of the constraint pivot.
- Precondition
- btGeneric6DofConstraint::calculateTransforms() must be called previously.
Definition at line 726 of file btGeneric6DofConstraint.cpp.
|
inline |
Retrieves the angular limit informacion.
Definition at line 500 of file btGeneric6DofConstraint.h.
|
inline |
Retrieves the limit informacion.
Definition at line 506 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 552 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 555 of file btGeneric6DofConstraint.h.
|
inline |
Test limit.
- free means upper < lower,
- locked means upper == lower
- limited means upper > lower
- limitIndex: first 3 are linear, next 3 are angular
Definition at line 535 of file btGeneric6DofConstraint.h.
|
inlineprotected |
Definition at line 329 of file btGeneric6DofConstraint.h.
|
inlinevirtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented from btTypedConstraint.
Reimplemented in btGeneric6DofSpringConstraint.
Definition at line 618 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 669 of file btGeneric6DofConstraint.cpp.
|
inline |
Definition at line 475 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 487 of file btGeneric6DofConstraint.h.
Definition at line 1046 of file btGeneric6DofConstraint.cpp.
| void btGeneric6DofConstraint::setFrames | ( | const btTransform & | frameA, |
| const btTransform & | frameB | ||
| ) |
Definition at line 710 of file btGeneric6DofConstraint.cpp.
Definition at line 512 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 621 of file btGeneric6DofConstraint.cpp.
|
inline |
Definition at line 455 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 465 of file btGeneric6DofConstraint.h.
|
virtual |
override the default global value of a parameter (such as ERP or CFM), optionally provide the axis (0..5).
If no axis is provided, it uses the default axis for this constraint.
Implements btTypedConstraint.
Definition at line 945 of file btGeneric6DofConstraint.cpp.
|
inline |
Definition at line 553 of file btGeneric6DofConstraint.h.
|
inline |
Definition at line 556 of file btGeneric6DofConstraint.h.
| bool btGeneric6DofConstraint::testAngularLimitMotor | ( | int | axis_index | ) |
Test angular limit.
Calculates angular correction and returns true if limit needs to be corrected.
- Precondition
- btGeneric6DofConstraint::calculateTransforms() must be called previously.
Definition at line 446 of file btGeneric6DofConstraint.cpp.
| void btGeneric6DofConstraint::updateRHS | ( | btScalar | timeStep | ) |
Definition at line 703 of file btGeneric6DofConstraint.cpp.
Member Data Documentation
|
protected |
Definition at line 320 of file btGeneric6DofConstraint.h.
|
protected |
hinge_parameters
Definition at line 303 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 314 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 313 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 315 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 311 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 312 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 316 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 317 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 325 of file btGeneric6DofConstraint.h.
|
protected |
relative_frames
the constraint space w.r.t body A
Definition at line 285 of file btGeneric6DofConstraint.h.
|
protected |
the constraint space w.r.t body B
Definition at line 286 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 318 of file btGeneric6DofConstraint.h.
|
protected |
3 orthogonal angular constraints
Definition at line 292 of file btGeneric6DofConstraint.h.
|
protected |
Jacobians.
3 orthogonal linear constraints
Definition at line 291 of file btGeneric6DofConstraint.h.
|
protected |
Linear_Limit_parameters.
Definition at line 297 of file btGeneric6DofConstraint.h.
|
protected |
temporal variables
Definition at line 310 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 322 of file btGeneric6DofConstraint.h.
|
protected |
Definition at line 323 of file btGeneric6DofConstraint.h.
| bool btGeneric6DofConstraint::m_useSolveConstraintObsolete |
for backwards compatibility during the transition to 'getInfo/getInfo2'
Definition at line 360 of file btGeneric6DofConstraint.h.
The documentation for this class was generated from the following files:
