The btConvexHullShape implements an implicit convex hull of an array of vertices. More...
#include <btConvexHullShape.h>
Public Member Functions | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btConvexHullShape (const btScalar *points=0, int numPoints=0, int stride=sizeof(btVector3)) | |
| this constructor optionally takes in a pointer to points. More... | |
| void | addPoint (const btVector3 &point, bool recalculateLocalAabb=true) |
| btVector3 * | getUnscaledPoints () |
| const btVector3 * | getUnscaledPoints () const |
| const btVector3 * | getPoints () const |
| getPoints is obsolete, please use getUnscaledPoints More... | |
| void | optimizeConvexHull () |
| btVector3 | getScaledPoint (int i) const |
| int | getNumPoints () const |
| virtual btVector3 | localGetSupportingVertex (const btVector3 &vec) const |
| virtual btVector3 | localGetSupportingVertexWithoutMargin (const btVector3 &vec) const |
| virtual void | batchedUnitVectorGetSupportingVertexWithoutMargin (const btVector3 *vectors, btVector3 *supportVerticesOut, int numVectors) const |
| virtual void | project (const btTransform &trans, const btVector3 &dir, btScalar &minProj, btScalar &maxProj, btVector3 &witnesPtMin, btVector3 &witnesPtMax) const |
| virtual const char * | getName () const |
| virtual int | getNumVertices () const |
| virtual int | getNumEdges () const |
| virtual void | getEdge (int i, btVector3 &pa, btVector3 &pb) const |
| virtual void | getVertex (int i, btVector3 &vtx) const |
| virtual int | getNumPlanes () const |
| virtual void | getPlane (btVector3 &planeNormal, btVector3 &planeSupport, int i) const |
| virtual bool | isInside (const btVector3 &pt, btScalar tolerance) const |
| virtual void | setLocalScaling (const btVector3 &scaling) |
| in case we receive negative scaling More... | |
| virtual int | calculateSerializeBufferSize () const |
| virtual const char * | serialize (void *dataBuffer, btSerializer *serializer) const |
| fills the dataBuffer and returns the struct name (and 0 on failure) More... | |
 Public Member Functions inherited from btPolyhedralConvexAabbCachingShape Public Member Functions inherited from btPolyhedralConvexAabbCachingShape | |
| void | getNonvirtualAabb (const btTransform &trans, btVector3 &aabbMin, btVector3 &aabbMax, btScalar margin) const |
| virtual void | getAabb (const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const |
| getAabb's default implementation is brute force, expected derived classes to implement a fast dedicated version More... | |
| void | recalcLocalAabb () |
| Public Member Functions inherited from btPolyhedralConvexShape | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btPolyhedralConvexShape () | |
| virtual | ~btPolyhedralConvexShape () |
| virtual bool | initializePolyhedralFeatures (int shiftVerticesByMargin=0) |
| optional method mainly used to generate multiple contact points by clipping polyhedral features (faces/edges) experimental/work-in-progress More... | |
| virtual void | setPolyhedralFeatures (btConvexPolyhedron &polyhedron) |
| const btConvexPolyhedron * | getConvexPolyhedron () const |
| virtual void | calculateLocalInertia (btScalar mass, btVector3 &inertia) const |
| Public Member Functions inherited from btConvexInternalShape | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| virtual | ~btConvexInternalShape () |
| const btVector3 & | getImplicitShapeDimensions () const |
| void | setImplicitShapeDimensions (const btVector3 &dimensions) |
| warning: use setImplicitShapeDimensions with care changing a collision shape while the body is in the world is not recommended, it is best to remove the body from the world, then make the change, and re-add it alternatively flush the contact points, see documentation for 'cleanProxyFromPairs' More... | |
| void | setSafeMargin (btScalar minDimension, btScalar defaultMarginMultiplier=0.1f) |
| void | setSafeMargin (const btVector3 &halfExtents, btScalar defaultMarginMultiplier=0.1f) |
| virtual void | getAabbSlow (const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const |
| virtual const btVector3 & | getLocalScaling () const |
| const btVector3 & | getLocalScalingNV () const |
| virtual void | setMargin (btScalar margin) |
| virtual btScalar | getMargin () const |
| btScalar | getMarginNV () const |
| virtual int | getNumPreferredPenetrationDirections () const |
| virtual void | getPreferredPenetrationDirection (int index, btVector3 &penetrationVector) const |
| Public Member Functions inherited from btConvexShape | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btConvexShape () | |
| not supported on IBM SDK, until we fix the alignment of btVector3 More... | |
| virtual | ~btConvexShape () |
| btVector3 | localGetSupportVertexWithoutMarginNonVirtual (const btVector3 &vec) const |
| btVector3 | localGetSupportVertexNonVirtual (const btVector3 &vec) const |
| btScalar | getMarginNonVirtual () const |
| void | getAabbNonVirtual (const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const |
| Public Member Functions inherited from btCollisionShape | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| btCollisionShape () | |
| virtual | ~btCollisionShape () |
| virtual void | getBoundingSphere (btVector3 ¢er, btScalar &radius) const |
| virtual btScalar | getAngularMotionDisc () const |
| getAngularMotionDisc returns the maximum radius needed for Conservative Advancement to handle time-of-impact with rotations. More... | |
| virtual btScalar | getContactBreakingThreshold (btScalar defaultContactThresholdFactor) const |
| void | calculateTemporalAabb (const btTransform &curTrans, const btVector3 &linvel, const btVector3 &angvel, btScalar timeStep, btVector3 &temporalAabbMin, btVector3 &temporalAabbMax) const |
| calculateTemporalAabb calculates the enclosing aabb for the moving object over interval [0..timeStep) result is conservative More... | |
| bool | isPolyhedral () const |
| bool | isConvex2d () const |
| bool | isConvex () const |
| bool | isNonMoving () const |
| bool | isConcave () const |
| bool | isCompound () const |
| bool | isSoftBody () const |
| bool | isInfinite () const |
| isInfinite is used to catch simulation error (aabb check) More... | |
| int | getShapeType () const |
| virtual btVector3 | getAnisotropicRollingFrictionDirection () const |
| the getAnisotropicRollingFrictionDirection can be used in combination with setAnisotropicFriction See Bullet/Demos/RollingFrictionDemo for an example More... | |
| void | setUserPointer (void *userPtr) |
| optional user data pointer More... | |
| void * | getUserPointer () const |
| void | setUserIndex (int index) |
| int | getUserIndex () const |
| virtual void | serializeSingleShape (btSerializer *serializer) const |
Private Attributes | |
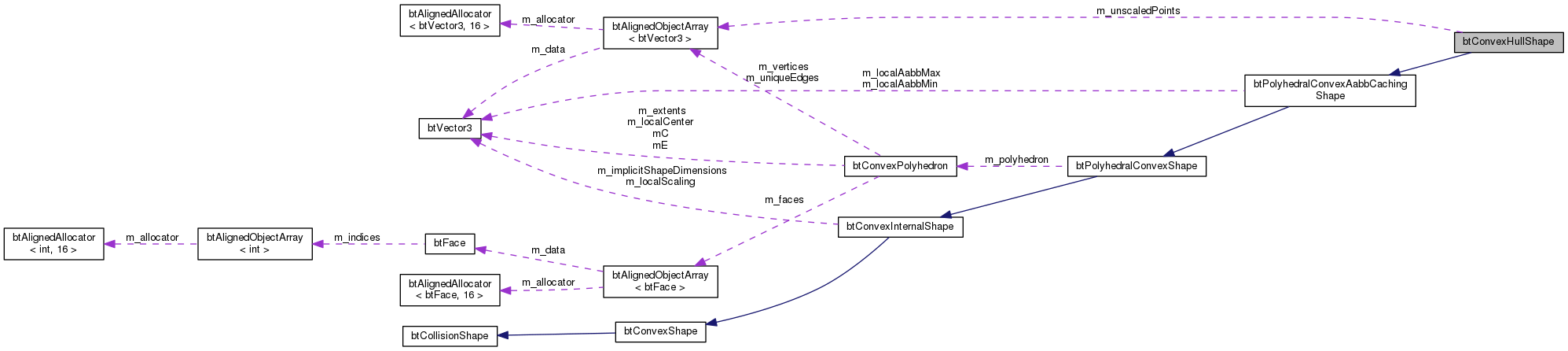
| btAlignedObjectArray< btVector3 > | m_unscaledPoints |
Additional Inherited Members | |
| Protected Member Functions inherited from btPolyhedralConvexAabbCachingShape | |
| void | setCachedLocalAabb (const btVector3 &aabbMin, const btVector3 &aabbMax) |
| void | getCachedLocalAabb (btVector3 &aabbMin, btVector3 &aabbMax) const |
| btPolyhedralConvexAabbCachingShape () | |
| Protected Member Functions inherited from btConvexInternalShape | |
| btConvexInternalShape () | |
| Protected Attributes inherited from btPolyhedralConvexShape | |
| btConvexPolyhedron * | m_polyhedron |
| Protected Attributes inherited from btConvexInternalShape | |
| btVector3 | m_localScaling |
| btVector3 | m_implicitShapeDimensions |
| btScalar | m_collisionMargin |
| btScalar | m_padding |
| Protected Attributes inherited from btCollisionShape | |
| int | m_shapeType |
| void * | m_userPointer |
| int | m_userIndex |
Detailed Description
The btConvexHullShape implements an implicit convex hull of an array of vertices.
Bullet provides a general and fast collision detector for convex shapes based on GJK and EPA using localGetSupportingVertex.
Definition at line 26 of file btConvexHullShape.h.
Constructor & Destructor Documentation
| btConvexHullShape::btConvexHullShape | ( | const btScalar * | points = 0, |
| int | numPoints = 0, |
||
| int | stride = sizeof(btVector3) |
||
| ) |
this constructor optionally takes in a pointer to points.
Each point is assumed to be 3 consecutive btScalar (x,y,z), the striding defines the number of bytes between each point, in memory. It is easier to not pass any points in the constructor, and just add one point at a time, using addPoint. btConvexHullShape make an internal copy of the points.
Definition at line 28 of file btConvexHullShape.cpp.
Member Function Documentation
| void btConvexHullShape::addPoint | ( | const btVector3 & | point, |
| bool | recalculateLocalAabb = true |
||
| ) |
Definition at line 54 of file btConvexHullShape.cpp.
|
virtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 78 of file btConvexHullShape.cpp.
| btConvexHullShape::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
|
inlinevirtual |
Reimplemented from btConvexInternalShape.
Definition at line 114 of file btConvexHullShape.h.
Implements btPolyhedralConvexShape.
Definition at line 152 of file btConvexHullShape.cpp.
|
inlinevirtual |
Implements btCollisionShape.
Definition at line 79 of file btConvexHullShape.h.
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 147 of file btConvexHullShape.cpp.
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 166 of file btConvexHullShape.cpp.
|
inline |
Definition at line 65 of file btConvexHullShape.h.
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 142 of file btConvexHullShape.cpp.
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 171 of file btConvexHullShape.cpp.
|
inline |
getPoints is obsolete, please use getUnscaledPoints
Definition at line 53 of file btConvexHullShape.h.
|
inline |
Definition at line 60 of file btConvexHullShape.h.
|
inline |
Definition at line 42 of file btConvexHullShape.h.
|
inline |
Definition at line 47 of file btConvexHullShape.h.
|
virtual |
Implements btPolyhedralConvexShape.
Definition at line 161 of file btConvexHullShape.cpp.
Implements btPolyhedralConvexShape.
Definition at line 178 of file btConvexHullShape.cpp.
Reimplemented from btConvexInternalShape.
Definition at line 108 of file btConvexHullShape.cpp.
|
virtual |
Reimplemented from btPolyhedralConvexShape.
Definition at line 62 of file btConvexHullShape.cpp.
| void btConvexHullShape::optimizeConvexHull | ( | ) |
Definition at line 126 of file btConvexHullShape.cpp.
|
virtual |
Reimplemented from btConvexShape.
Definition at line 221 of file btConvexHullShape.cpp.
|
virtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented from btConvexInternalShape.
Definition at line 185 of file btConvexHullShape.cpp.
|
virtual |
in case we receive negative scaling
Reimplemented from btPolyhedralConvexAabbCachingShape.
Definition at line 48 of file btConvexHullShape.cpp.
Member Data Documentation
|
private |
Definition at line 28 of file btConvexHullShape.h.
The documentation for this class was generated from the following files:
