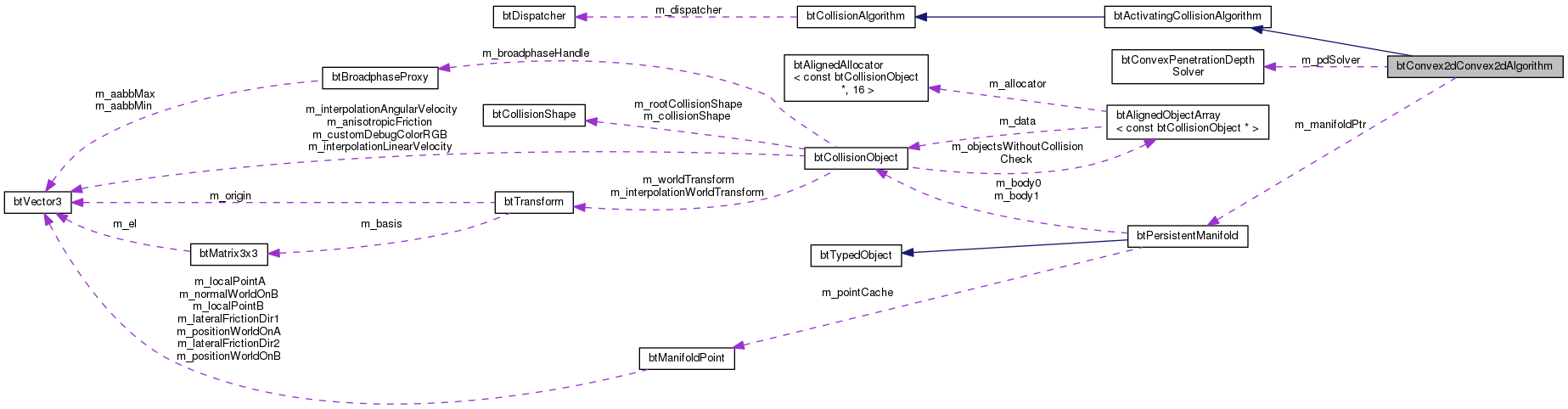
The convex2dConvex2dAlgorithm collision algorithm support 2d collision detection for btConvex2dShape Currently it requires the btMinkowskiPenetrationDepthSolver, it has support for 2d penetration depth computation. More...
#include <btConvex2dConvex2dAlgorithm.h>
Classes | |
| struct | CreateFunc |
Private Attributes | |
| btSimplexSolverInterface * | m_simplexSolver |
| btConvexPenetrationDepthSolver * | m_pdSolver |
| bool | m_ownManifold |
| btPersistentManifold * | m_manifoldPtr |
| bool | m_lowLevelOfDetail |
Additional Inherited Members | |
 Protected Member Functions inherited from btActivatingCollisionAlgorithm Protected Member Functions inherited from btActivatingCollisionAlgorithm | |
| btActivatingCollisionAlgorithm (const btCollisionAlgorithmConstructionInfo &ci) | |
| btActivatingCollisionAlgorithm (const btCollisionAlgorithmConstructionInfo &ci, const btCollisionObjectWrapper *body0Wrap, const btCollisionObjectWrapper *body1Wrap) | |
| Protected Attributes inherited from btCollisionAlgorithm | |
| btDispatcher * | m_dispatcher |
Detailed Description
The convex2dConvex2dAlgorithm collision algorithm support 2d collision detection for btConvex2dShape Currently it requires the btMinkowskiPenetrationDepthSolver, it has support for 2d penetration depth computation.
Definition at line 33 of file btConvex2dConvex2dAlgorithm.h.
Constructor & Destructor Documentation
| btConvex2dConvex2dAlgorithm::btConvex2dConvex2dAlgorithm | ( | btPersistentManifold * | mf, |
| const btCollisionAlgorithmConstructionInfo & | ci, | ||
| const btCollisionObjectWrapper * | body0Wrap, | ||
| const btCollisionObjectWrapper * | body1Wrap, | ||
| btSimplexSolverInterface * | simplexSolver, | ||
| btConvexPenetrationDepthSolver * | pdSolver, | ||
| int | numPerturbationIterations, | ||
| int | minimumPointsPerturbationThreshold | ||
| ) |
Definition at line 58 of file btConvex2dConvex2dAlgorithm.cpp.
|
virtual |
Definition at line 73 of file btConvex2dConvex2dAlgorithm.cpp.
Member Function Documentation
|
virtual |
Rather then checking ALL pairs, only calculate TOI when motion exceeds threshold
Linear motion for one of objects needs to exceed m_ccdSquareMotionThreshold col0->m_worldTransform,
Convex0 against sphere for Convex1
Simplification, one object is simplified as a sphere
Sphere (for convex0) against Convex1
Simplification, one object is simplified as a sphere
Implements btCollisionAlgorithm.
Definition at line 151 of file btConvex2dConvex2dAlgorithm.cpp.
|
inlinevirtual |
should we use m_ownManifold to avoid adding duplicates?
Implements btCollisionAlgorithm.
Definition at line 54 of file btConvex2dConvex2dAlgorithm.h.
|
inline |
Definition at line 65 of file btConvex2dConvex2dAlgorithm.h.
|
virtual |
Implements btCollisionAlgorithm.
Definition at line 95 of file btConvex2dConvex2dAlgorithm.cpp.
| void btConvex2dConvex2dAlgorithm::setLowLevelOfDetail | ( | bool | useLowLevel | ) |
Definition at line 82 of file btConvex2dConvex2dAlgorithm.cpp.
Member Data Documentation
|
private |
Definition at line 41 of file btConvex2dConvex2dAlgorithm.h.
|
private |
Definition at line 40 of file btConvex2dConvex2dAlgorithm.h.
|
private |
Definition at line 39 of file btConvex2dConvex2dAlgorithm.h.
|
private |
Definition at line 36 of file btConvex2dConvex2dAlgorithm.h.
|
private |
Definition at line 35 of file btConvex2dConvex2dAlgorithm.h.
The documentation for this class was generated from the following files:
